A servo motor is defined as an electric motor that allows for precise control of angular or linear position, speed, and torque. It consists of a suitable motor coupled to a sensor for position feedback and a controller that regulates the motor’s movement according to a desired setpoint.
Servo motors are essential in industries like robotics, CNC machinery, and automated manufacturing due to their precision, quick responsiveness, and fluid motion.
In this article, we will explain the basic theory of servo motors, how they work, how they are controlled, and what are some of their common applications.
What is a Servo Motor?
Servo Motor Introduction: A servo motor is an electric motor that adjusts its position, speed, or torque in response to controller inputs.
The term servo comes from the Latin word servus, meaning servant or slave. This reflects the historical use of servo motors as auxiliary drives that assist the main drive system.
However, modern servo motors are capable of providing high performance and precision as main drives in various applications.
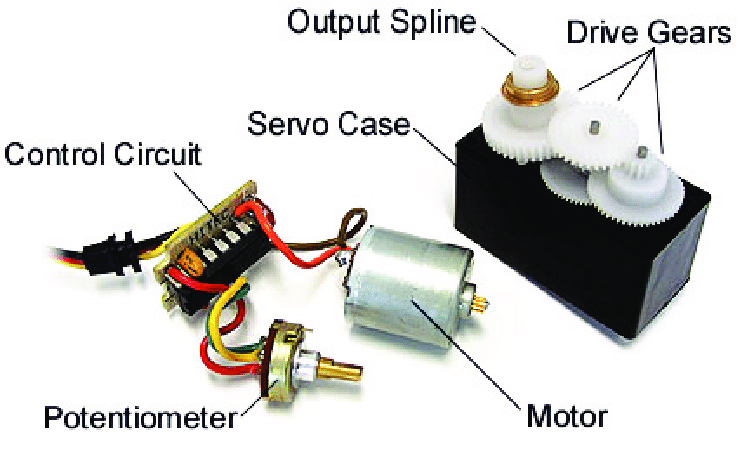
A servo motor consists of three main components:
-
- A motor: This can be either a DC motor or an AC motor depending on the power source and the application requirements. The motor provides the mechanical power to rotate or move the output shaft.
-
- A sensor: This can be either a potentiometer, an encoder, a resolver, or another device that measures the position, speed, or torque of the output shaft and sends feedback signals to the controller.
-
- A controller: This can be either an analog or a digital circuit that compares the feedback signals from the sensor with the desired setpoint signals from an external source (such as a computer or a joystick) and generates control signals to adjust the motor’s voltage or current accordingly.
The controller employs a closed-loop feedback system, adjusting the motor’s movement to closely align with the desired setpoint, maintaining strict accuracy.
The controller can also implement various control algorithms, such as proportional-integral-derivative (PID) control, fuzzy logic control, adaptive control, etc., to optimize the performance of the servo motor.
How Does a Servo Motor Work?
The basic working principle of a servo motor involves the controller receiving two types of input signals:
-
- A setpoint signal: This is an analog or digital signal that represents the desired position, speed, or torque of the output shaft.
-
- A feedback signal: This is an analog or digital signal that represents the actual position, speed, or torque of the output shaft measured by the sensor.
The controller compares these two signals and calculates an error signal that represents the difference between them.
The error signal is then processed by a control algorithm (such as PID) that generates a control signal that determines how much voltage or current should be applied to the motor.
The control signal is sent to a power amplifier (such as an H-bridge) that converts it into an appropriate voltage or current level for driving the motor.
The motor then rotates or moves according to the control signal and changes its position, speed, or torque, and sends a new feedback signal to the controller.
The process repeats until the error signal becomes zero or negligible, indicating that the output shaft has reached the desired setpoint.
Types of Servo Motors
Servo motors can be classified into different types based on their power source, construction, feedback mechanism, and application.
AC Servo Motors

AC servo motors are electric motors that operate on alternating current (AC). They have a stator that generates a rotating magnetic field and a rotor that follows the field.
AC servo motors, powered by alternating current, feature a stator that creates a rotating magnetic field, with a rotor that synchronizes with this field for efficient operation.
AC servo motors can be further divided into two types: synchronous and asynchronous.
-
- Synchronous AC servo motors have a permanent magnet rotor that rotates at the same speed as the stator field. They are more efficient, precise, and responsive than asynchronous motors, but they require a more complex controller and a position sensor.
-
- Asynchronous AC servo motors have a wound rotor that induces a current and a magnetic field that lags behind the stator field. They are simpler, cheaper, and more rugged than synchronous motors, but they have lower efficiency, accuracy, and speed.
AC servo motors are suitable for high-power applications that require high speed, torque, and reliability. They are commonly used in industrial machines, robotics, CNC machines, etc.
DC Servo Motors
DC servo motors are electric motors that operate on direct current (DC). They have a permanent magnet stator that generates a fixed magnetic field and a wound rotor that rotates when a current is applied.
DC servo motors can be further divided into two types: brushed and brushless.
-
- Brushed DC servo motors have a commutator and brushes that switch the current direction in the rotor windings. They are simple, inexpensive, and easy to control, but they have lower efficiency, lifespan, and speed due to friction and wear of the brushes.
-
- Brushless DC servo motors have an electronic controller that switches the current direction in the stator windings. They are more efficient, durable, and fast than brushed motors, but they require a more sophisticated controller and a position sensor.
DC servo motors are suitable for low-power applications that require high precision, responsiveness, and smooth motion. They are commonly used in hobby projects, toy cars, CD/DVD players, etc.
Linear Servo Motors

Linear servo motors are electric motors that produce linear motion instead of rotary motion. They have a stationary part called a forcer or primary that contains coils or magnets, and a moving part called a platen or secondary that contains magnets or iron cores.
Linear servo motors can be further divided into two types: iron-core and ironless.
-
- Iron-core linear servo motors have iron cores in the platen that interact with the magnetic field of the forcer. They have high force density, stiffness, and accuracy, but they also have high cogging force, weight, and heat generation.
-
- Ironless linear servo motors have no iron cores in the platen, only magnets. They have low cogging force, weight, and heat generation, but they also have low force density, stiffness, and accuracy.
-
- Linear servo motors are suitable for applications that require high speed, acceleration, and precision over long distances. They are commonly used in semiconductor manufacturing, metrology, laser cutting, etc.
How to Control a Servo Motor?
The control of a servo motor depends on the type of motor, the feedback mechanism, and the application requirements.
Generally, there are two types of control signals that can be used to control a servo motor: analog and digital.
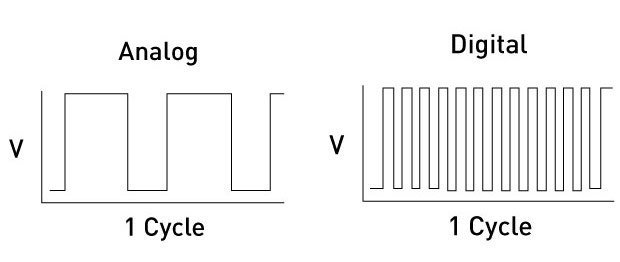
-
- Analog control signals are continuous voltage or current signals that vary proportionally to the desired setpoint. They are typically used for simple or low-cost servo systems that do not require high accuracy or resolution. For example, a potentiometer can be used to generate an analog control signal for a hobby servo motor.
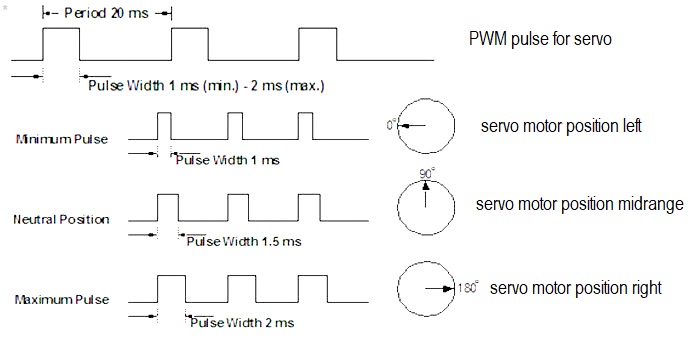
-
- Digital control signals are discrete pulses or bits that represent the desired setpoint in a coded form. They are typically used for complex or high-performance servo systems that require high accuracy, resolution, or communication. For example, a pulse-width modulation (PWM) signal can be used to generate a digital control signal for a brushless DC servo motor.
The controller of a servo motor can be either an external device or an integrated circuit within the motor. The controller receives the control signals from an external source (such as a computer or a joystick), and the feedback signals from the sensor and generates the appropriate control signals for driving the motor.
The controller can also implement various control algorithms to optimize the performance of the servo motor. Some of the common control algorithms are:
-
- Proportional-integral-derivative (PID) control: This is a feedback-based control algorithm that adjusts the control signal based on the proportional, integral, and derivative terms of the error signal. It is widely used for servo systems that require a fast and accurate response.
-
- Fuzzy logic control: This is a rule-based control algorithm that adjusts the control signal based on fuzzy sets and linguistic variables. It is useful for servo systems that deal with uncertainty or nonlinearities.
-
- Adaptive control: This is a self-tuning control algorithm that adjusts the control parameters based on the changing conditions of the servo system. It is beneficial for servo systems that face disturbances or variations.
Applications of Servo Motors
Servo motors have a wide range of applications in various fields and industries. Some of the common applications are:
-
- Robotics: Servo motors are used to provide precise motion and force for robotic arms, legs, joints, grippers, etc. They enable robots to perform tasks such as picking, placing, welding, assembling, etc.
-
- CNC machinery: Servo motors are used to drive the axes of CNC machines such as lathes, mills, routers, etc. They enable CNC machines to perform accurate and complex machining operations such as cutting, drilling, engraving, etc.
-
- Automated manufacturing: Servo motors are used to control the movement and position of various components and devices in automated manufacturing systems, such as conveyors, feeders, loaders, unloaders, etc. They enable automated manufacturing systems to achieve high productivity and quality.
-
- Medical equipment: Servo motors are used to operate various medical devices and instruments such as surgical robots, scanners, pumps, ventilators, etc. They enable medical equipment to perform precise and safe operations and treatments.
Conclusion
We have seen that servo motors are electric motors that allow for precise control of angular or linear position, speed, and torque. They consist of a motor, a sensor, and a controller that form a closed-loop feedback system.
We have also seen that servo motors can be classified into different types based on their power source, construction, feedback mechanism, and application. Some of the common types are AC servo motors, DC servo motors, and linear servo motors.
We have also seen that servo motors can be controlled by either analog or digital signals that represent the desired setpoint. The controller can also implement various control algorithms to optimize the performance of the servo motor.
We have also seen that servo motors have a wide range of applications in various fields and industries, such as robotics, CNC machinery, automated manufacturing, medical equipment, etc.